# 開始前介紹
這一章節主要是介紹一些數學的基礎,如果發現哪個部分不熟的話,最好能親自磨練一下,因為以後常常需要的時候,如果不懂箇中原理,那麼在偵錯或是實作上,會遇到一些麻煩。當然領悟過後能寫起來是最推薦的方式,以後忘了的時候瞟一眼就行了。初學者如果看不懂本篇的話,可以暫且跳過無妨,當有用到再回頭看,因為現在的文章是搭配官方藍寶書的章節推進,而藍寶書比較適合中階以上閱讀者,所以本篇對初學者來說應該很吃力。
接下來會介紹的內容基本上有:
- 向量
- 反射與折射
- 矩陣
- 相關座標系統
- 攝影機
- 透視投影與正交投影
- 直線與曲線
- GLM
# 向量
這邊應該大家都有學過,在此只是把我自己領略的概念描述出來,如果不懂的話,請參閱其他數學專業網站。
# 何謂向量
向量的定義是一個方向附帶著一個量的數值,而為什麼需要一個有數值的方向呢?因為想將向量運用到各種不同的地方,這樣就可以不需要同樣的原點與終點來重現這樣的動作。我們假設一個二維的座標平面,上面有一個點 p1 還有一個點 p2 ,用 $ p_2 - p_1 $ 所得到的就是從 $ p_1 $ 指向 $ p_2 $ 的向量,如果想不通就想成 p2 與原點 $ o $ 的關係是 $ p_2 - o $,也就是從原點指向 $ p_2 $ 的向量。
# 基本性質
向量的加減性質跳過。
# 長度
如果向量是 $ (1,2,3) $ 長度的定義是 $ \sqrt{1^2 + 2^2 + 3^2} $,向量已經是兩點相減的結果,所以只要將各個分量平方後開根號就是長度。
# 單位向量
若向量是 $ (1,2,3) $ 則單位向量就是其向量除以長度,也就是 $ \left(\frac{1}{\sqrt{14}},\frac{2}{\sqrt{14}},\frac{3}{\sqrt{14}}\right) $
這樣的好處是,可以得到往該方向一個單位長度需要多少向量。也就是說上方的各自平方後相加長度等於一。而單位向量的概念在OpenGL中稱之為Normalize。
# 內積
內積的定義是這樣的 $ \vec{a} \cdot \vec{b} = a_xb_x+a_yb_y+a_zb_z $
直接看看不出它的意義是什麼,他還有另一個特性是 $ \vec{a} \cdot \vec{b} = \left| \vec{a} \right| \left| \vec{b} \right| \cos{\theta} $
在圖學中內積常常用來求的是角度,也就是說根據上方的另一個性質,將長度移到左方然後算出內積的值,就可以得到 $ value = \cos{\theta} $ 的情況,也就是可以知道角度是多少,這是內積常常運用在圖學中的部分。至於上方的兩定義由來就不探討。
# 外積
外積的定義是 $ \vec{V}_1 \times \vec{V}_2 = \vec{V}_3$
⎣⎢⎢⎡V3.xV3.yV3.z⎦⎥⎥⎤=⎣⎢⎢⎡V1.y⋅V2.z−V1.z⋅V2.yV1.z⋅V2.x−V1.x⋅V2.zV1.x⋅V2.y−V1.y⋅V2.x⎦⎥⎥⎤
得到的 $ \vec{V}_3 $ 就是垂直於 $ \vec{V}_1 , \vec{V}_2 $的向量,依照弗萊明右手定則就可以知道該垂直向量應該往哪裡垂直,且別擔心,不管怎麼比都會在定則內的。在圖學中,會用到的就是外積算出來垂直於表面的特性,也就是Normal Vector,這個光影特效中時常使用的向量。
# 反射與折射
# 反射
反射有個特性,就是入射角等於反射角,然後依照圖片所示,我們要算出反射角的方法有兩種。一種是不用將入射角反轉,直接位移兩個垂直平面的分量。另一種是將入射角反轉,移動兩個水平分量,而這裡介紹的是移動兩個垂直分量的方法。
結果公式為:
Rreflect=Rin−(2N⋅Rin)N
解釋 : 反射分量 = 入射分量 - 兩個垂直表面的分量。
正式理解,我們直觀來看入射角 Rin 應該要減去兩個垂直於法向量 N 的 Rin 垂直分量。直觀來看就是 Rin 加上兩個 ∣−Rin∣cosθ×∣N∣N,而 −Rin 代表反的入射角,因為要跟垂直分量算夾角,必須要兩向量都從頭個原點出發才行。那為何是 ∣−Rin∣ 呢?因為透過三角形的畢氏定理,就可以換算成在該垂直分量上的長度多少,之後再轉回向量,也就是要乘上 N 的單位向量 ∣N∣N,就可以得知在該方向上的分量是多少,這裡運用到投影向量的技巧,需要自行去熟悉一下。
來認真的推看看:
原式:
Rin+2×∣−Rin∣cosθ×∣N∣N
化簡多餘的部分(對了N固定是單位向量,也就是長度為1):
Rin+2×∣−Rin∣cosθ×N
由於 −Rin⋅N=∣−Rin∣∣N∣cosθ
又可以是 −Rin⋅N=∣−Rin∣cosθ
因此化簡為:
Rin+2×−Rin⋅N∗N
負號提出來:
Rin−2×Rin⋅N∗N
最後將上方的原式拿來比較:
Rreflect=Rin−(2N⋅Rin)N=Rin−2×Rin⋅N×N
得證相等,與理解的無誤。
# 折射
折射的部分,Dowen也尚未理解,公式牽涉較深物理,理論是說,入射方介質 $ \eta $ 小於折射方介質$ \eta $ ,那折射方就會偏向法向量,反之就會偏離,不是物理學者,我想知道概念足矣。
\begin{gather}
k = 1 - \eta^2(1 - (N \cdot R)^2) \\
R_{refract} =
\begin{cases}
0.0 & \text{if $k < 0.0 $} \\[2ex]
\eta R - (\eta (N \cdot R) + \sqrt{k})N & \text{if $k \ge 0.0$}
\end{cases}
\end{gather}
# 矩陣
說到矩陣,以前完全想不透為何經過矩陣轉換,得到的東西是一個有意義的東西。某日深研後,發現矩陣是由方程式的演變而來的,聽起來很理所當然,不過當題目做多了,反思一下卻忘了本源是什麼,就有點慌慌的。接下來就用方程式與矩陣一起說明,不直接用矩陣說明的方式來教學。至於矩陣的乘法,在這裡就不贅述,矩陣只是一種方程式變相的工具使用而已,如果有疑慮請詳閱專業數學相關網站。
# 位移
假設一物體位於三維空間中 pold(x,y,z) 點上,那要移動至 pnew(x+2,y+3,z−5) 的點在方程式上該如何表示呢?
p_{old} (x_{old}, y_{old}, z_{old}) , \\
p_{new} (x_{new}, y_{new}, z_{new}) , \\
x_{new} = x_{old} + 2 \\
y_{new} = y_{old} + 3 \\
z_{new} = z_{old} - 5
位移在方程式上算是比較特殊的轉法,一般我們矩陣是3x1(新座標) = 3x3 * 3x1(原座標)。但是可以發現相乘後,只會縮放各個x, y, z的座標後相加。
⎣⎢⎢⎡a1a2a3b1b2b3c1c2c3⎦⎥⎥⎤⎣⎢⎢⎡xoldyoldzold⎦⎥⎥⎤=⎣⎢⎢⎡a1⋅xold+b1⋅yold+c1⋅zolda2⋅xold+b2⋅yold+c2⋅zolda3⋅xold+b3⋅yold+c3⋅zold⎦⎥⎥⎤
在這裡加上一個四維座標空間的概念,圖學中常常使用到,但實際上仍是三維的一個輔助法。
⎣⎢⎢⎢⎢⎡a1a2a3a4b1b2b3b4c1c2c3c4w1w2w3w4⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xoldyoldzoldwold⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡a1⋅xold+b1⋅yold+c1⋅zold+w1⋅wolda2⋅xold+b2⋅yold+c2⋅zold+w2⋅wolda3⋅xold+b3⋅yold+c3⋅zold+w3⋅wolda4⋅xold+b4⋅yold+c4⋅zold+w4⋅wold⎦⎥⎥⎥⎥⎤
擴充成四維空間後,這樣看起來沒什麼意義。但是當在不必要的地方填入0,還有必要的地方填入1後,就會變以下這樣。
⎣⎢⎢⎢⎢⎡100001000010w1w2w31⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xoldyoldzold1⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡1⋅xold+0⋅yold+0⋅zold+w1⋅10⋅xold+1⋅yold+0⋅zold+w2⋅10⋅xold+0⋅yold+1⋅zold+w3⋅10⋅xold+0⋅yold+0⋅zold+1⋅1⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡xold+w1yold+w2zold+w31⎦⎥⎥⎥⎥⎤
這樣子就變成一個位移專用的矩陣,仍然不會用到我們擴充的第四維,但是又可以輔助三維空間的位移。
⎣⎢⎢⎢⎢⎡10000100001023−51⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xoldyoldzold1⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡1⋅xold+0⋅yold+0⋅zold+2⋅10⋅xold+1⋅yold+0⋅zold+3⋅10⋅xold+0⋅yold+1⋅zold−5⋅10⋅xold+0⋅yold+0⋅zold+1⋅1⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡xold+2yold+3zold−51⎦⎥⎥⎥⎥⎤
以上就是位移矩陣的由來。在定位一個物體在世界座標中哪個位置時常使用。
# 旋轉
旋轉矩陣我在這篇文章中有寫過,因此把結果提出來,讓我們知道方程式與矩陣的關係。
原本的方程式如下:
x_{new} = x_{old} \cos \theta - y_{old} \sin \theta \\
y_{new} = x_{old} \sin \theta + y_{old} \cos \theta \\
換成矩陣後:
⎣⎡cosθsinθ−sinθcosθ⎦⎤⎣⎡xoldyold⎦⎤=⎣⎡xoldcosθ−yoldsinθxoldsinθ+yoldcosθ⎦⎤
如果要放到3D世界來使用,有兩點要思考。
- 這樣的旋轉在3D世界中是屬於依照X還是Y還是Z呢? Ans: Z
- 要位移怎麼辦?只能是XYZ軸嗎?
這篇文章介紹每個大概,只介紹依照XYZ軸的旋轉,如果是依照任意軸,或更勝之是四元數,這些較適合以後開文章討論,或是請讀者至參考連結去閱讀,如果有問題可以提出來討論,Dowen在寫這篇文章的時候都已閱讀完畢。
####歐拉角####
以旋轉矩陣來進行旋轉的集合統稱為歐拉角,順序有先XYZ, ZYX ,YZX, XZY...各種組合。如果是以世界座標的XYZ旋轉,不會產生問題。但是如果以物體座標的話,就會產生意想不到的問題。怎麼說呢? 拿起手機,螢幕對著自己,當作Z軸指向自己,上方當作Y軸,右方當作X軸。 那如果以ZXY的矩陣來旋轉會產生什麼問題呢?首先以Z轉任意角度,X轉90度,之後Y的選轉軸,與Z就重合了。有人會想物體的Z也在變阿? 實際上,電腦藉由矩陣運算的時候,轉完Z之後,轉了X後,Z已經不會有任何改變,因為那是之前轉完的。而X轉了90度後,Y剛好與原Z軸重合,導致Y與Z軸只能轉一樣的方向。 這就是所謂的萬向鎖(Gimbal Lock)
先擴充成以Z軸的三維旋轉
⎣⎢⎢⎡cosθsinθ0−sinθcosθ0001⎦⎥⎥⎤
以上讀者可以以之前的方式自行證明。接下來要擴充成四維空間,原因是之前說過的,為了位移的技巧。
⎣⎢⎢⎢⎢⎡cosθsinθ00−sinθcosθ0000100001⎦⎥⎥⎥⎥⎤
順便列出剩下兩個以x與y的旋轉。
以Y軸旋轉
⎣⎢⎢⎢⎢⎡cosβ0−sinβ00100sinβ0cosβ00001⎦⎥⎥⎥⎥⎤
以X軸旋轉
⎣⎢⎢⎢⎢⎡10000cosαsinα00−sinαcosα00001⎦⎥⎥⎥⎥⎤
順便一提,如果自己推出的矩陣與上不符,不一定是錯的,只是在圖學中,上方是符合右手定則,逆時針旋轉,以Z軸旋轉來說,就是Z不變, X軸朝向Y軸移動形成看起來逆時針的旋轉。(圖學中Z軸永遠指向螢幕外,也就是指向自己)
# 縮放
縮放其實很簡單,不論你原本的點是在負向的部分還是正向,經由縮放後,會靠近0,或者遠離0,矩陣如下。
⎣⎢⎢⎢⎢⎡xoldyoldzold1⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡Sx0000Sy0000Sz00001⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡SxxoldSyyoldSzzold1⎦⎥⎥⎥⎥⎤
# 相關座標空間
使用OpenGL需要接觸到許多三維座標空間,看到以下列出這麼多,也不需要太慌張,其實都是一點一點演變而來的,這一連串的座標空間都息息相關。
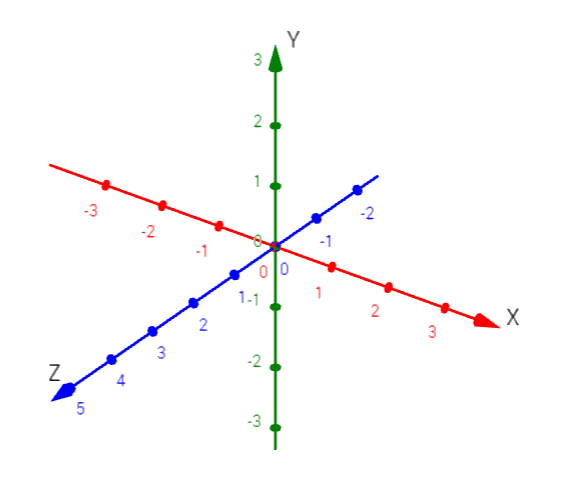
# 笛卡爾座標
這是我們最常使用到的座標系統,直角坐標系統,也稱為笛卡爾座標系統,這個就不多做說明。
# 齊次座標
先來看下面這張圖。
鐵軌旁邊兩條平行的軌道,理應是一直線不會交合的,但是現實世界中,他們越遠就會越相近。而距今約兩百年前的天文學家 奧古斯特·費迪南德·莫比烏斯(August Ferdinand Möbius) 發展了齊次座標的概念,使用齊次概念的座標系統,都要在其維度多增加一維。 (而剛好的,增加一維又可以讓位移矩陣發揮作用,這不知道是不是一種數學的巧合呢?)
而齊次與笛卡爾的關係如下:
二維:
$ (x,y,w) = \left( \frac{x}{w},\frac{y}{w} \right) $
三維: (投影矩陣部分詳細說明, 先看二維就好)
$ (x,y,z,w) = \left( \frac{x}{w},\frac{y}{w},\frac{z}{w} \right) $
舉例如下:
$ (2,3,5)_h = \left(\frac{2}{5},\frac{3}{5}\right)_c (4,6,10)_h = \left(\frac{4}{10},\frac{6}{10}\right)_c = \left(\frac{2}{5},\frac{3}{5}\right)_c (2a,3a,5a)_h = \left(\frac{2}{5},\frac{3}{5}\right)_c $
利用齊次的概念讓兩條平行線有交集:
{Ax+By+C=0Ax+By+D=0
在上方的笛卡爾空間中,這兩條線除非 $ C = D $ ,否則不可能有交集。
而利用齊次的概念就是將 $ w $ 放進來,把 $ x $ 取代為 $ \frac{x}{w} , y $ 取代為 $ \frac{y}{w} $
而w 的範圍是 $ 1 \ge w > 0$ ,其意義是遠近的意思。 越遠w值越小。
⎩⎨⎧Awx+Bwy+C=0Awx+Bwy+D=0
如果 $ w = 1 $ 那一切都沒變,但若 $ w $趨近於0,就會發生一件事,前兩項參數的值過於巨大,導致C,D的影響完全不重要。不過換個角度看的話會更明顯,這次改成這樣。
{Ax+By+C×w=0Ax+By+D×w=0
這樣很容易就可看出越遠C,D值越小,導致最後匯聚於一點的狀況。這就是在笛卡爾空間中運用齊次座標的效果。
以圖來表示:
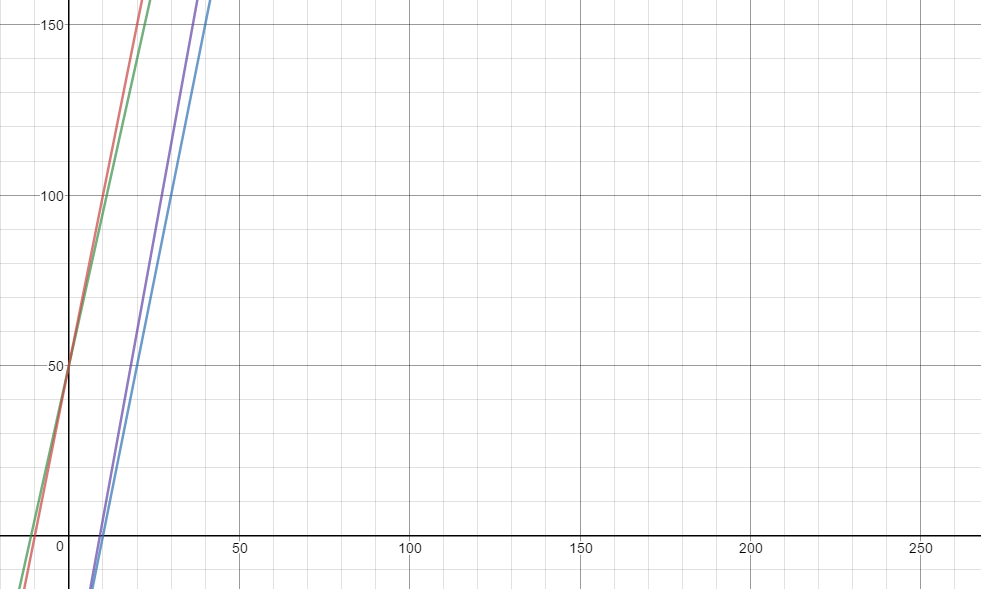
- 紅線: r=5x+50
- 藍線: b=5x−50
- 綠色: g=5x−50×w
- 紫色: p=5x−50×w
- w(深度): w=1−x/100 (只要看x = 0 ~ 100的範圍, 超過都不在實驗範圍)
上圖表示到$ x = 100$這個點的時候會聚在一起,而且是逐漸匯聚。
# 物體座標
不管事人物、花瓶、球,任何物體在建置的時候都有一個Local Space,稱為物體座標,在這物體座標中,建置的每個點都是相對於原點。通常都會把物體的每個頂點都定義在原點附近,因為這不是真正在遊戲或場警中出現的位置,所以在這個空間建置的模型,只需要專注建模即可。
# 世界座標
把物體放到世界座標(World Space),我們利用一個矩陣稱為Model矩陣。這是圖學常見的MVP矩陣中的第一段,將物體定位於世界的空間中。而Model矩陣可以由上方所提出的旋轉、位移、縮放所組成,但要注意順序是有差別的,正常我們會先縮放,再旋轉、在位移,原因是如果先位移,那旋轉轉的就不是模組本身,而是將模組以旋轉的方式位移。另外先旋轉,後縮放,在位移也是等可以的,如果不是這兩種方式,那就是有其他用途。總之,經過Model矩陣後,物體就會被放到世界場景中該有的位置。
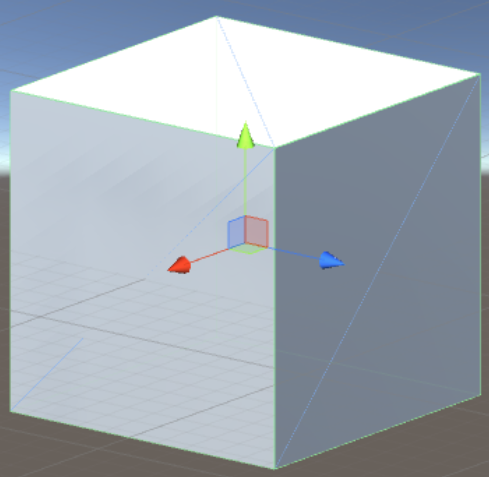
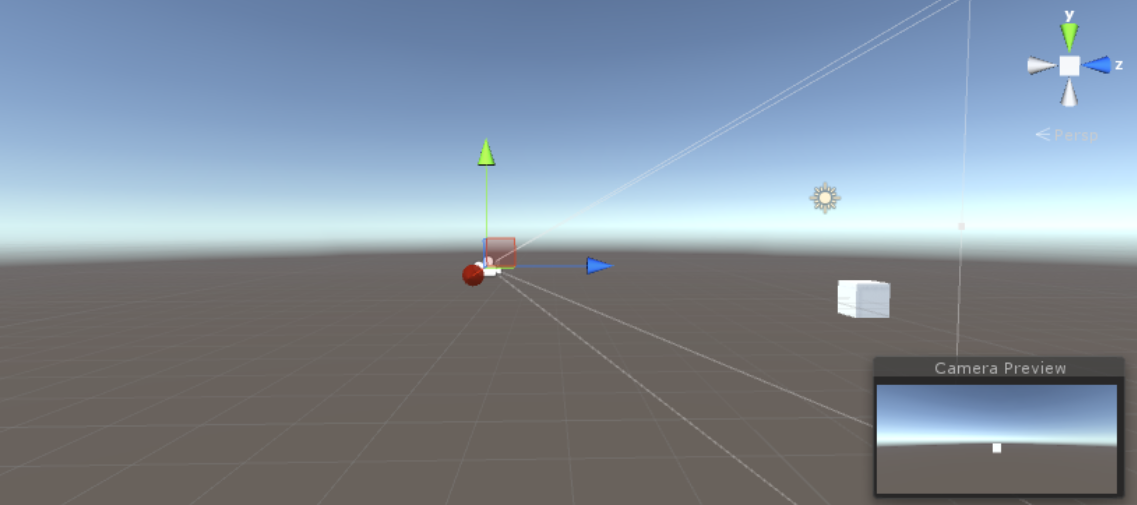
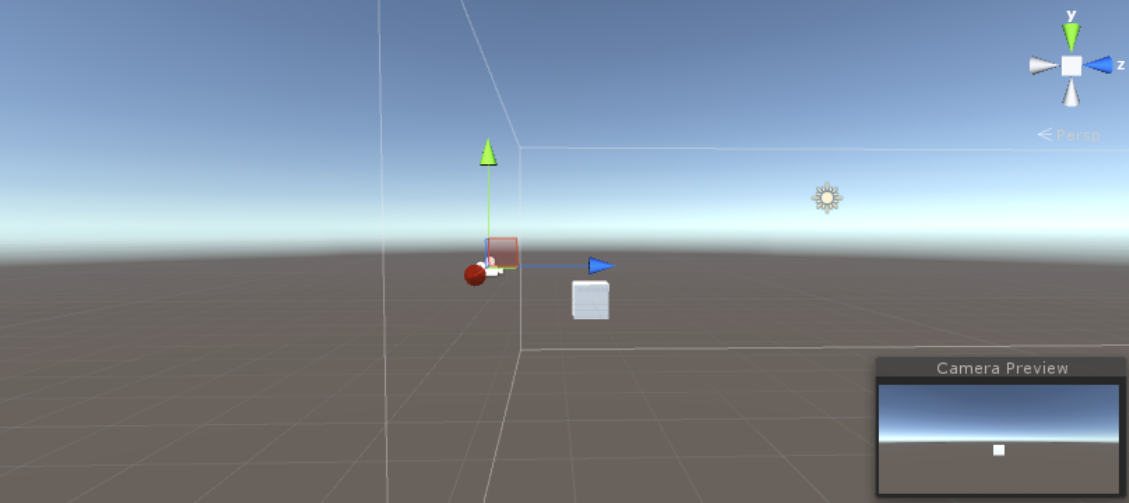
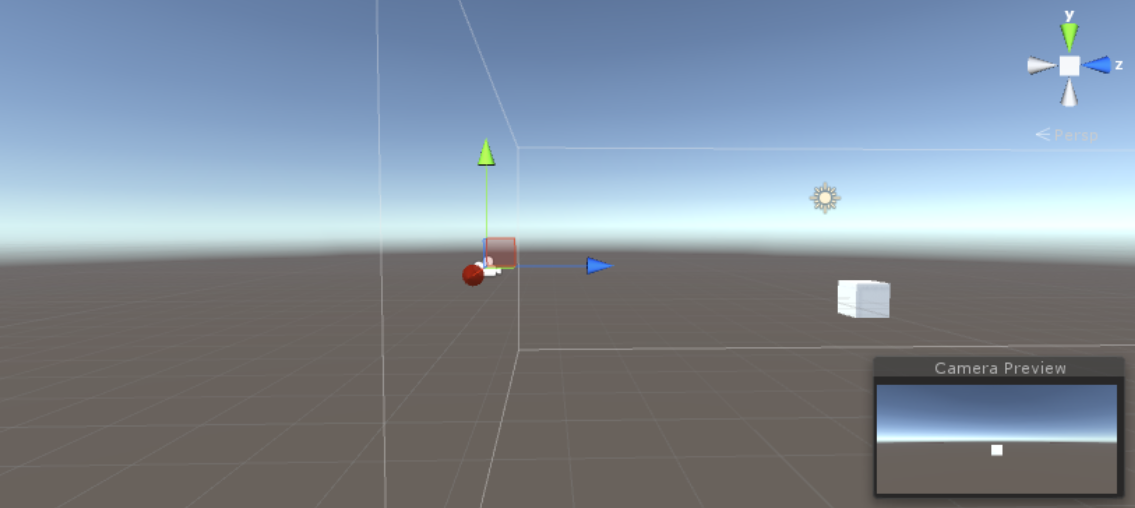
# 視覺座標
世界座標轉到視覺座標(View Space),這裡使用View矩陣,而這空間也可以說是攝影機空間,將所有世界座標中的物體,經過旋轉位移後,移動到攝影機的面前,也就是世界的長相都取決於攝影機的位置,拍攝角度。跟現實不同的是,現實是攝影機移動拍攝世界,圖學中是世界移動到攝影機面前,或是移出攝影機外。
右下角那個攝影機拍攝畫面就是視覺座標的樣子。其實這裡以圖來表示不是很正確,因為還經過了正交投影,不懂正交投影的話,就先假設圖中就是正確的,因為正交實際上做的事不多。
# 投影座標
最後來到的這個座標叫做(Clip Space),使用到的矩陣稱為Projection矩陣,原理是透過兩個平面,一個近,一個遠,然後這個範圍內的物體影像(頂點)投射到近平面上,如果是線性投射(透視投影),就會是仿現實生活的畫面,但也是我們最習慣看到的畫面,如下。
近物
遠物
而如果是經過正交投影,直接將範圍透的物體作投射,那麼就不會有遠近的感覺。不過正交投影自然有它存在的價值,像是做影子就會使用到,初學者需要多多消化理解這部分,因為正交視覺上頗為不直觀。
近物
遠物
# 攝影機
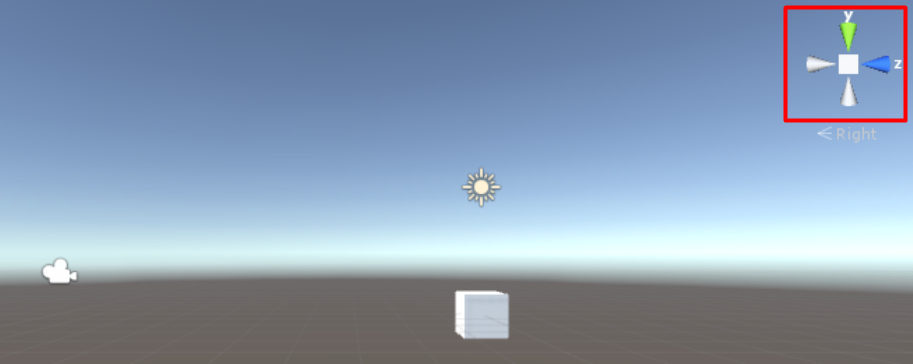
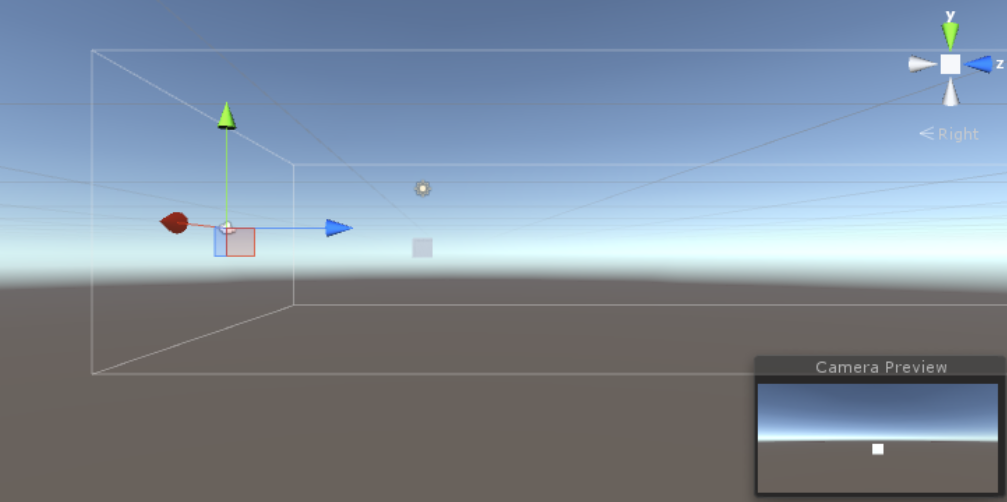
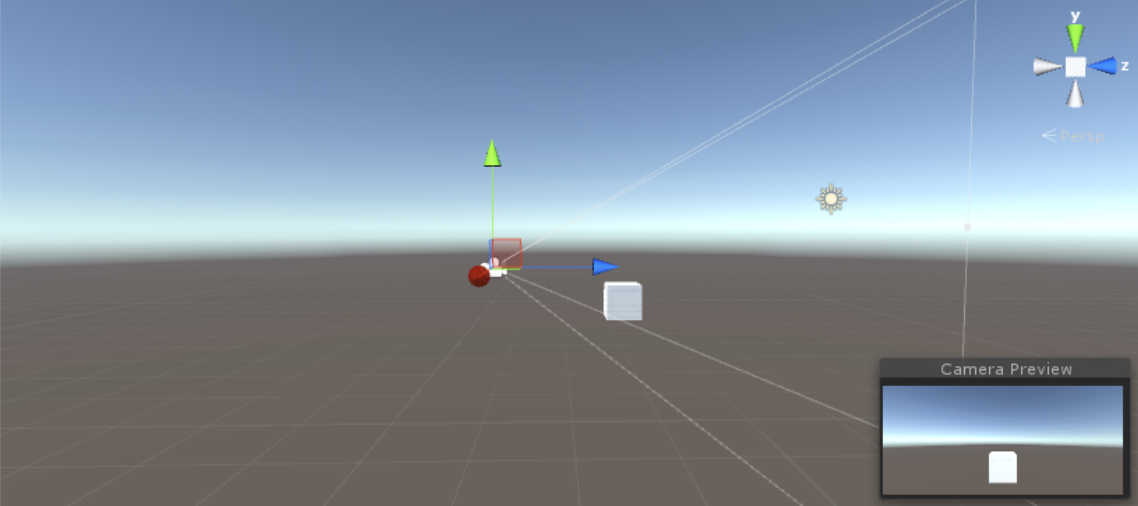
一台攝影機,有拍攝角度跟攝影機的座標位置。這邊就先從簡單的攝影機位置在視覺座標中,與View矩陣到底有什麼關係說起。開始前先說明,畫面是從投影矩陣過後在xyz為-1 ~ 1之間的影像,所以移動到攝影機前這個動作,可能會聯想到,那原本的攝影機在哪? 為何要移動攝影機? 其實預設是有一個假攝影機,他會將那些頂點位於-1 ~ 1之間的描繪出來,所以之前的文章才可以顯示出三角形,而這裡是要給讀者知道,要自訂一台攝影機所需要的知識。
# 攝影機的位置
假設一攝影機位於(1,2,3)的三維空間中,那若要以該攝影機為視覺出發點該如何做呢? 簡單來說,就是朝向(−1,−2,−3)位移就好了,這裡的疑點應該是,攝影機都在(1,2,3)了,為何還要移動(−1,−2,−3)呢?原因是假定的這台攝影機,實際上也不存在,所有的視野都只會看到位於(−1,−1,−1)到(1,1,1)這個正方體(或稱為Normalize Device Coordination)中,也因此正中心是在(0,0,0),也就是說要假裝正中心在(1,2,3)的話,那就是這世界的每個物體都要往反方向的(1,2,3)移動,也就是(−1,−2,−3)。舉個實際的例子,當一台攝影機往右邊平移拍攝的時候,攝影機假設沒再動,那也就是拍攝的物體往左方移動了,讓你誤以為往右平移拍攝,上面的原理就是如此,以為攝影機從原點(0,0,0)跑到(1,2,3),實際上是所有物體從世界座標的(x,y,z)變成(x−1,y−2,z−3),產生攝影機在動的錯覺。對了,不管哪個矩陣都是對每個物體的世界座標做相乘,而不是對攝影機這個抽象物體。
而攝影機關於位置的位移矩陣如下:
⎣⎢⎢⎢⎢⎡100001000010−Camerax−Cameray−Cameraz1⎦⎥⎥⎥⎥⎤
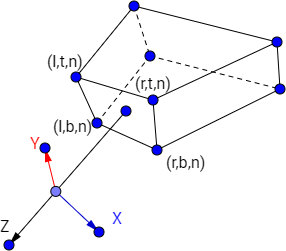
# 攝影機的拍攝角度
攝影機的拍攝角度,基本上是由三個向量所定義而成的,攝影機的前方C⃗f,攝影機的上方C⃗u,攝影機的右方C⃗r,有了這三個方向的向量,就可以知道,要怎麼旋轉,不過與其說是旋轉,不如說是座標轉換,將原本軸是(1,0,0),(0,1,0),(0,0,1)的三個互相垂直的向量,轉換成以C⃗r, C⃗u, C⃗f為xyz軸的空間。
首先要先了解原座標空間在矩陣上是如何表示。
⎣⎢⎢⎢⎢⎡1000010000100001⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xoldyoldzold1⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡xoldyoldzold1⎦⎥⎥⎥⎥⎤
上方斜對角為一的稱為單位矩陣,撇去名詞,就是一個塞了XYZ三軸單位向量的矩陣,且多了一個不會用到的擴充四維。那麼在攝影機座標空間中是如何看待原座標空間中的點呢? 關係如下:
⎣⎢⎢⎢⎢⎡Cr.xCu.xCf.x0Cr.yCu.yCf.y0Cr.zCu.zCf.z00001⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xoldyoldzold1⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡Cr.x⋅xold+Cr.y⋅yold+Cr.z⋅zoldCu.x⋅xold+Cu.y⋅yold+Cu.z⋅zoldCf.x⋅xold+Cf.y⋅yold+Cf.z⋅zold1⎦⎥⎥⎥⎥⎤
而換算矩陣就是C⃗r, C⃗u, C⃗f所構成的。也就是說如果此時你要在X軸移動一單位,需要(Cr.x,Cr.y,Cr.z)個單位才能在畫面上向右移動一格,忘了提到,這裡所使用到的攝影機向量都是單位向量。
而如果要使用攝影機的話,文末提供的GLM有一個名為LookAt(cameraPositon, target, cameraUp),這個原理就是上方所講的,只是這裡的三個參數,就可以產生出三個向量,像是C⃗f 只要利用 target - cameraPositon之後Normalize就可以達成,而C⃗u就是cameraUp,最後的C⃗r只要利用C⃗u×C⃗f就可以得到最後的向量了,這裡外積的順序是yz相乘得x,如果是zy就會是-x,若無法理解請拿原本的(0,1,0)×(0,0,1)來做測試。
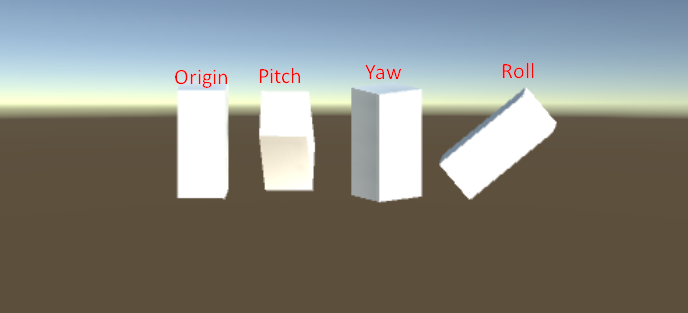
而要操縱攝影機則要了解攝影機旋轉的概念,主要有三種旋轉方式。一個是Pitch,抬頭與低頭的概念。一個是Yaw,左轉與右轉的概念。一個是Roll,趴睡的時候,你的頭就會轉這種以鼻子為軸的方式旋轉。而概念圖如下:
在座標系統上的概念如下:
Pitch
Yaw
Pitch(抬頭),即是向量往Y軸移動,若假設向量長度為r,那XYZ三者與Pitch夾角θ關係如下:
\begin{align}
y& = r\sin{\theta}\\
x& = r\cos{\theta} \cdot \cos{plane}\\
z& = r\cos{\theta} \cdot \sin{plane}\\
\end{align}
其中 plane 代表的是原本X,Z在平面上的分量,而且是常數。不過如果加入Yaw(回頭)的話,就可以改變這個情況,如上圖所示,Yaw代表的是X朝向Z的旋轉關係,所以只要把 plane 改為 $ \alpha $ 就可以完成Pitch與Yaw的攝影機。
\begin{align}
y& = r\sin{\theta}\\
x& = r\cos{\theta} \cdot \cos{\alpha}\\
z& = r\cos{\theta} \cdot \sin{\alpha}\\
\end{align}
至於Roll這個旋轉,較少出現在攝影機的移動中,不管遊戲還是編輯器中,所使用的攝影機多半是Pitch與Yaw的組合,也因此這裡不會有萬向鎖的問題。不過這裡要注意的是這裡的Yaw跟Pitch與歐拉角中的旋轉不相等,因為本文中的Pitch一次就動到了xyz三點的值,算是一種對任意軸的旋轉,而之前所介紹的旋轉公式是對固定軸,
# 透視投影與正交投影
透視投影 近物
透視投影 遠物
正交投影 近物
正交投影 遠物
回顧一下之前看到的兩張圖,透視投影接近現實,越遠的物體就會越小。正交投影屬於理想向量世界,不管物體遠近,都會顯示他原本定義的大小。而不管透視或正交假想上都有一個遠盤(far plane),跟一個近盤(near plane),在兩盤之間的物體就會出現在畫面上,超出兩盤的都無法看見。
而這個階段的目的是為了將View階段的xview,yview,zview,1,轉換到Projection階段的xclip,yclip,zclip,wclip,順道一提,clip space也可以稱為projection space。概念公式如下:
⎝⎜⎜⎜⎜⎛xndcyndczndc1⎠⎟⎟⎟⎟⎞=⎝⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎛wclipxclipwclipyclipwclipzclipwclipwclip⎠⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎞
算出Clip space後,交給OpenGL會自動用透視除法(perspective devision),來轉成NDC空間的座標,而上方除以w的概念就是透視除法,也是齊次座標中所使用到的概念,因為wclip,其實是view space的zview。
###透視投影###
先從困難的透視投影講起,之後正交就簡單了,在這個階段主要有四個步驟,當然化為程式都是一個數學式,不過要理解透視投影的每個步驟就要一步一步分開詳細探討。
# 第一步:X的線性投影
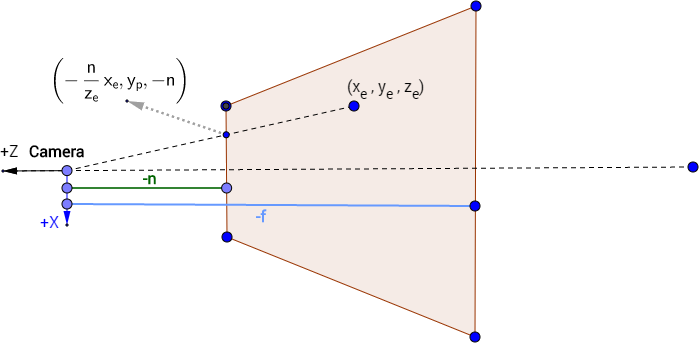
從上方看透視投影區
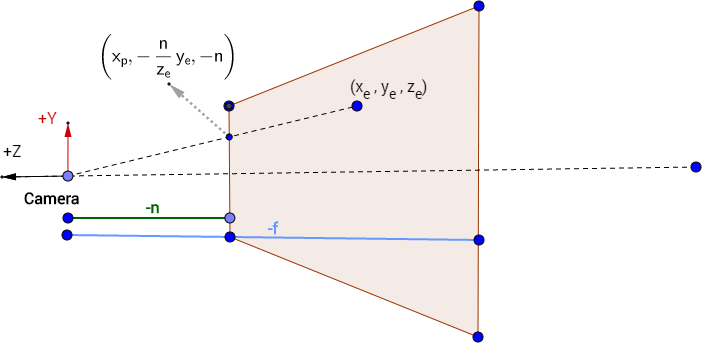
從側邊看透視投影區
上圖中,e代表的是View Space中的座標,p代表projection座標,要注意的是,這並不是clip space,就是說這個階段是投影座標。
這個階段要產出的線性轉換如下:
\begin{align}
x_p& : x_e = -n : ze \\
x_p& = -n\frac{x_e}{z_e} = \frac{n x_e}{-z_e} \\
y_p& : y_e = -n : ze \\
y_p& = -n\frac{y_e}{z_e} = \frac{n y_e}{-z_e} \\
\end{align}
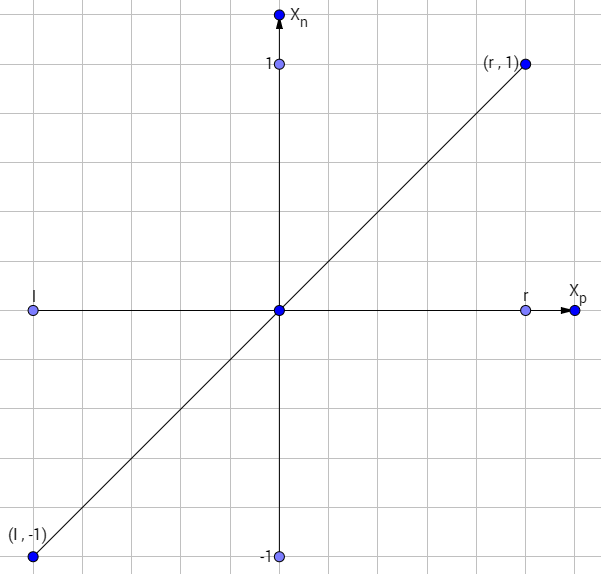
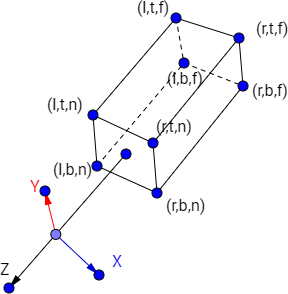
# 第二步:壓縮至-1 ~ 1
為何要壓縮至-1 ~ 1呢?這不是clip space到NDC空間才要由OpenGL轉換的嗎? 沒錯,不過投影階段直接就運算到最終的空間NDC,最後用了齊次座標的技巧,才讓NDC變回clip空間,接下來可以這技巧是如何變的,不過為什麼不直接給NDC給OpenGL,要換成clip space,個人臆測是因為OpenGL對深度有一個叫做Depth test或Stencil test的部分會用到。
首先將投影座標與Normalize後座標(NDC)的關係找出來:
上方轉換成數學關係式如下:
\begin{align}
x_n& = a x_p + b\\
x_p& = r, x_n = 1 \\
1& = ar + b\\
x_p& = l, x_n = -1\\
-1& = al + b\\
a& = \frac{1-(-1)}{r-l} ,
b = \frac{l+r}{l-r} \\
x_n& = \frac{2}{r-l}x_p + \frac{l+r}{l-r}\\
\end{align}
側視圖的公式大同小異:
\begin{align}
y_n& = a y_p + c\\
y_p& = t, y_n = 1 \\
1& = ar + c\\
t_p& = l, t_n = -1\\
-1& = ab + c\\
a& = \frac{1-(-1)}{t-b} ,
c = \frac{b+t}{b-t} \\
y_n& = \frac{2}{t-b}x_p + \frac{b+t}{b-t}\\
\end{align}
# 第三步:第一步代入第二步
到這個步驟是view -> proj -> ndc -> clip,第一步找出view -> proj的關係,第二步找出proj -> ndc的關係,這裡當然就是要找出ndc -> clip的關係,以view表示,畢竟要將view轉到clip。那就直接進入數學式吧。
\bbox[5px,border:2px solid black]
{
\begin{equation}
\begin{split}
x_n =& \frac{2}{r-l}x_p + \frac{l+r}{l-r} & x_p = \frac{n x_e}{-z_e}\\
=& \frac{2}{r-l}x_p - \frac{l+r}{r-l}
= \frac{2 \cdot \frac{n x_e}{-z_e} }{r-l} - \frac{l+r}{r-l}\\
=& \frac{2 n x_e}{(r-l)(-z_e)} - \frac{l+r}{r-l}
= \frac{\frac{2n}{r-l} \cdot x_e}{-z_e} - \frac{l+r}{r-l}\\
=& \frac{\frac{2n}{r-l} \cdot x_e}{-z_e} + \frac{\frac{l+r}{r-l} \cdot z_e}{-z_e}
= \frac{ \frac{2n}{r-l}\cdot x_e + \frac{l+r}{r-l} \cdot z_e }{-z_e}\\
=& \frac{x_c}{-z_e} & x_c = \frac{2n}{r-l}\cdot x_e + \frac{l+r}{r-l} \cdot z_e \\
\end{split}
\end{equation}
}
根據以上的NDC與View之間的關係,得到一個新的Clip座標xc,有發現為什麼−z會被留在那嗎? 那就是將齊次座標的概念留下,不過只看一個還看不出來,當每個座標都需要−z的輔助後,就會理解這樣的用意。不過還是要強調,這個步驟是將NDC的概念退回Clip的步驟,比較不是偏數學的概念,算是程式技巧才有Clip Space的存在。而y的方面就如同上方,讀者可以自行推導,直接進入下一步。
# 第四步:建立矩陣與填補矩陣未知部分
⎣⎢⎢⎢⎢⎡xcyczcwc⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡r−l2n0000t−b2n00−r−lr+lt−bt+bA−100B0⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xeyezewe⎦⎥⎥⎥⎥⎤
首先前兩行(row),就是我們第三步所推導的,而第四行只有一個−1,是因為已經決定讓−ze,當作最後要做透視除法的參數,也許可以等第三行推完之後,參考本節一開始所說的概念公式,來理解這段。而第三行前兩個值是0,因為透視投影主要是將投影空間中依照深度距離不同位置的x,y,投影到近盤上,既然其他人都依賴ze,ze也就不會依賴回去。因此只剩下兩個未知參數需要處理,而View Space中we是1,因此B成為輔助參數,讓zc與ze建立線性關係,就變成以下的形式。
zc=Aze+B
而要轉換回可以逆推導的情形,必須轉回NDC,因為clip space本身並沒有實質意義,這部分對剛接觸的人會有很多困惑,因為前面都是正向工程,到這裡要推zc卻要用逆向工程,返回zn,在回到zc。
zn=wczc=−zeAze+B=−zeAze+B
其實這段Dowen嘗試過正向推導,不過由於沒有zp與ze的何關係式,所以推不出來。
\begin{align}
z_n& = \frac{A z_e + B}{-z_e}\\
z_n& = -1, z_e = -n \\
-n& = -An + B\\
z_n& = l, z_e = -f\\
-f& = -Af + B\\
a& = -\frac{f+n}{f-n} ,
b = -\frac{2fn}{f-n} \\
z_n& = \frac{ -\frac{f+n}{f-n}z_e-\frac{2fn}{f-n} }{-z_e}\\
\end{align}
回到矩陣的形式如下:
⎣⎢⎢⎢⎢⎡xcyczcwc⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡r−l2n0000t−b2n00−r−lr+lt−bt+b−f−nf+n−100−f−n2fn0⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xeyezewe⎦⎥⎥⎥⎥⎤
以上是最終矩陣,將View轉成Clip空間,而通常不會使用以上的矩陣。我們通常使用的是正方形近盤,所以將t=r=−l=−b,矩陣會變換如下:
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡rn0000rn0000−f−nf+n−100−f−n2fn0⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡xeyezewe⎦⎥⎥⎥⎥⎤
接下來檢視一下OpenGL會用到的GLM函式glm::perspective(fov, aspect, near, far)。其矩陣原理如下:
⎣⎢⎢⎢⎢⎢⎢⎢⎡Xspec0000Yspec0000−f−nf+n−100−f−n2fn0⎦⎥⎥⎥⎥⎥⎥⎥⎤
\begin{align}
Y_{spec}& = \cot({fov/2}) \\
X_{spec}& = \frac{Y_{spec}}{aspect}
\end{align}
- fov: field of view,視野的意思,通常視野是45°,根據自定義而有所不同,至於為何是cot,看一下上上個矩陣,對邊分之鄰邊,而且視野只有一半。
- aspect: 視窗的比例,若視窗是500x500 這裡只要給1.0即可,若是800x600這裡就要給定800/600,在畫面就會顯示正常,原因是整個畫面要顯示-1 ~ 1的正方體,那x的部分就得多壓縮一點。
# 正交投影
正交投影,直接將點平行投影到投影近盤上,所以不會有xp與xe不同的問題,直接做線性轉換至NDC。
\begin{align}
x_n& = \frac{2}{r-l}x_e - \frac{r+l}{r-l}\\
y_n& = \frac{2}{t-b}y_e - \frac{t+b}{t-b}\\
z_n& = \frac{-2}{f-n}z_e - \frac{f+n}{f-n}\\
\end{align}
由於xe與 xn 沒有像透視投影跟深度有關,所以矩正很簡單的如下:
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡r−l20000t−b200−r−lr+l−t−bt+b−f−n2−100−f−nf+n0⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
# 直線與曲線
# 直線
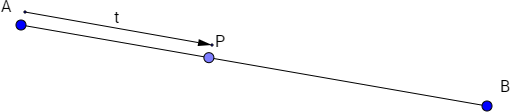
直線,最常想到的第一個公式是 $ y = ax + b $ ,但是利用向量表示,在電腦繪圖中反而會比較適合做Intepolation。向量表示如下:
\begin{align}
P& = A + t\vec{D} \\
\vec{D}& = (B - A) \\
P& = A + t(B-A) \\
\end{align}
上方的公式意義是表示A要往B移動,如果t = 1,表示點P已經從A移動到B。小於1的任何數值都代表還在路途中,這樣的表示法比原本的表示法的移動模式要直觀許多。
####Intepolation(內插)####
根據現有的資訊進行階段式前進,除了有關線的公式,利用向量步步前進的概念外,OpenGL在顏色上也有這樣的機制。Fragment Shader階段時,若使用者定義三個點各自的顏色,未給定其他像素的意義,OpenGL就會進行顏色的內插。假設有AB兩點,一者紅,一者藍,OpenGL就會自動用內插的方式進行顏色計算,概念如此: Colornew=ColorA+t(ColorB−ColorA)=(1−t)ColorA+tColorB。而GLSL語法裡面進行這樣計算的是一個叫mix(a, b, t)的內建函式,專門用來處理以上的動作。
# 曲線
最簡單的直線是利用兩條直線的方式混和移動而成,概念圖如下:
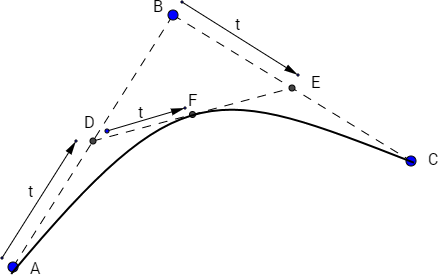
\begin{align}
D& = A + t(B-A) \\
E& = B + t(C-B) \\
P& = D + t(E-D) \\
P& = A + t(B-A) + t( B+t(C-B) - (A+t(B-A)) ) \\
P& = A + t(B-A) + Bt+t^2(C-B) - At - t^2(B-A)) \\
P& = A + t(B-A + B-A) + t^2(C-B-B-A) \\
P& = A + 2t(B-A) + t^2(C-2B-A) \\
\end{align}
透過兩條線瞬間產生出來的點,在將這兩點做直線移動就是以上的概念,當初Dowen看了許久,到這網站才了解到為何可以這樣混合公式的最初契機。這邊小題外話,有時候數學無法理解,是因為很多網站都沒提到其細部概念,也就是最初觀察到此現象的由來或契機,只說這樣是對的,然後用一堆複雜的數學佐證,所以才導致學習有礙。
剛剛其實就是有名的貝茲曲線,而這裡是介紹三次貝茲曲線,如果看懂的話,不論幾次也能自己推導了。
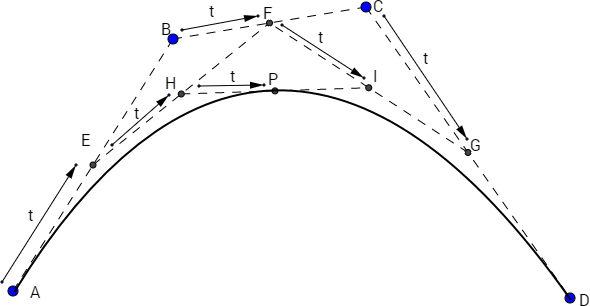
\begin{align}
E& = A + t(B-A) \\
F& = B + t(C-B) \\
G& = C + t(D-C) \\
H& = E + t(F-E) \\
I& = F + t(G-F) \\
P& = H + t(I-H) \\
\end{align}
二次懂,三次問題就不大。這裡就提一個貝茲曲線上的專有名詞Control Point,像是上方二次貝茲的控制點就是ABC,三次是ABCD,藉由更改這些點的位置,就可以改變曲線角度,理解控制點,就可以微調算出想要的曲線角度了。
# GLM
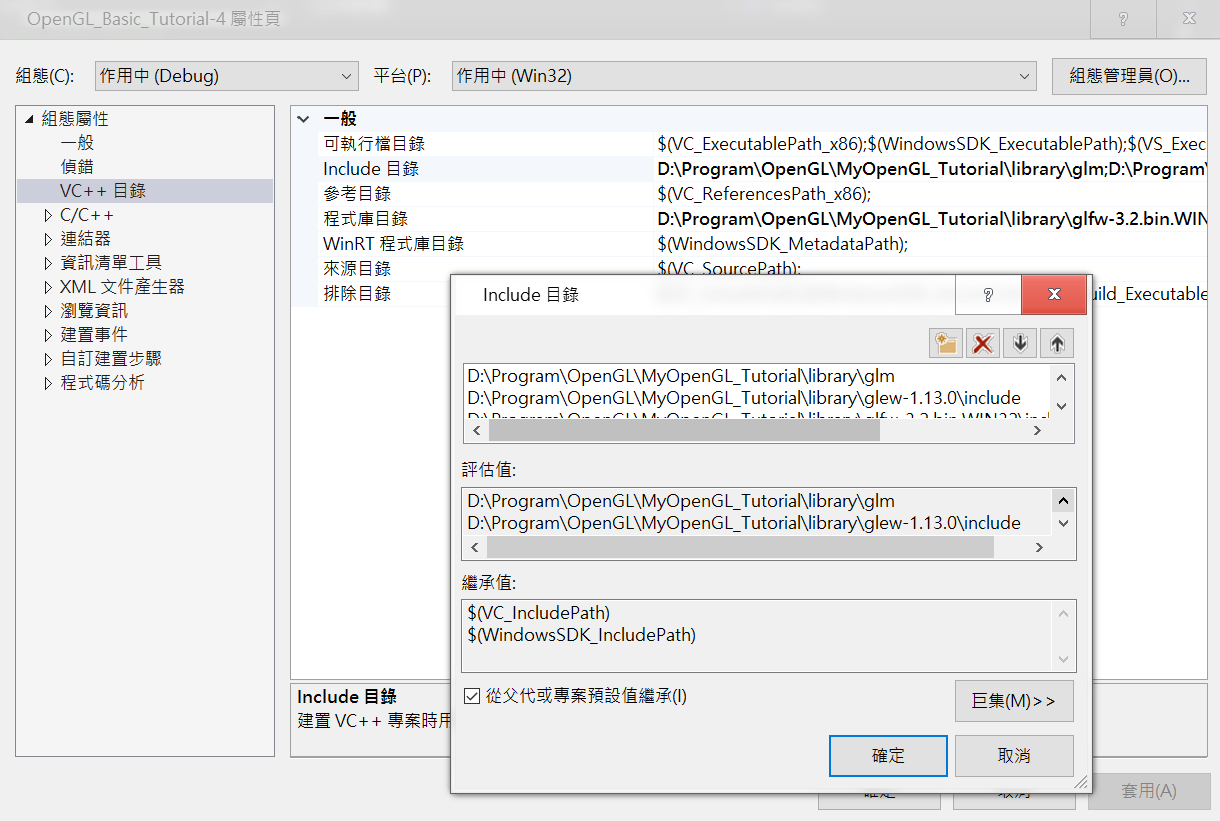
GLM(OpenGL Mathematics),是一個專門為OpenGL設計的數學函式庫,特別的是,它只需要將標頭檔加入,不需要引入lib,或是dll之類的組態檔,就可以引入環境中,所以不會有環境建置的困擾,首先只需要將標頭檔資料夾放到適當的位置,之後加入Include,就完成基本的載入。
之後加入泛用的程式標頭。
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtc/type_ptr.hpp>
測試一下矩陣乘法,理解一下概念。
glm::mat4 helloMatrix = glm::mat4(glm::vec4(1.0), glm::vec4(2.0), glm::vec4(3.0), glm::vec4(4.0));
int mlenght = 16;
glm::vec4 helloVector = glm::vec4(1.0f, 0.0f, 1.0f, 0.0f);
int vlenght = helloVector.length();
float *matrix = glm::value_ptr(helloMatrix);
float *vector = glm::value_ptr(helloVector);
glm::vec4 vresult = helloMatrix * helloVector;
float *result = glm::value_ptr(vresult);
std::cout << "Matrix:" << std::endl;
for (int i = 0; i < mlenght; i++)
{
std::cout << matrix[i] << ",";
if((i+1)%4 == 0)
std::cout << std::endl;
}
std::cout << std::endl;
std::cout << "Vector:" << std::endl;
for (int i = 0; i < vlenght; i++)
{
std::cout << vector[i] << ",";
if (i % 4 == 0 && i != 0)
std::cout << std::endl;
}
std::cout << std::endl;
std::cout << "Result:" << std::endl;
for (int i = 0; i < vlenght; i++)
{
std::cout << result[i] << ",";
if (i % 4 == 0 && i != 0)
std::cout << std::endl;
}
這會產生的結果如下:
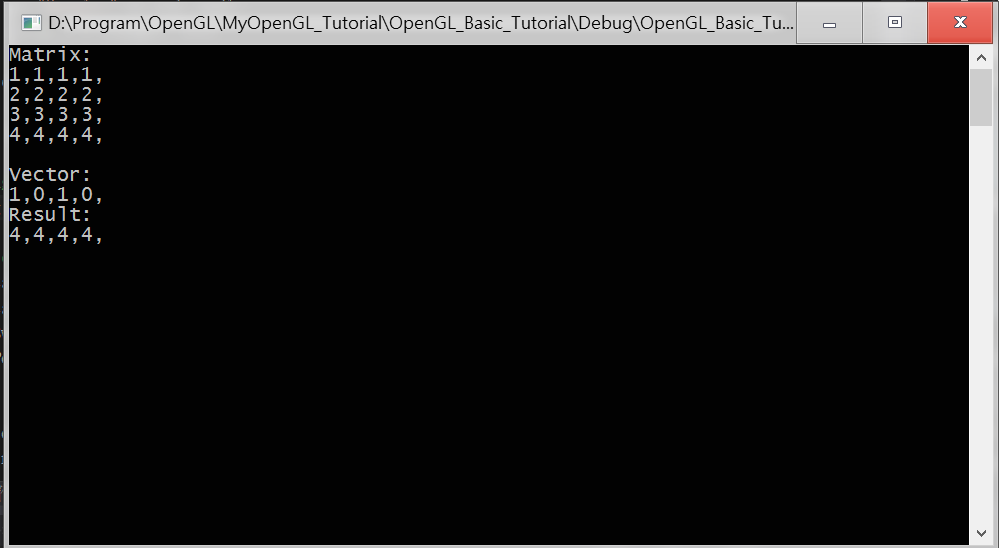
有發現結果不是正常的矩陣運算嗎?因為OpenGL在定義矩陣的時候都是先定義Column,再來才是Row,用數學來檢視一下結果的原因吧。
⎣⎢⎢⎢⎢⎡1234123412341234⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡1010⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡2468⎦⎥⎥⎥⎥⎤
上面如果是想要的結果,但實際上定義的向量是這樣被矩陣擺放的:
⎣⎢⎢⎢⎢⎡1111222233334444⎦⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎡1010⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡4444⎦⎥⎥⎥⎥⎤
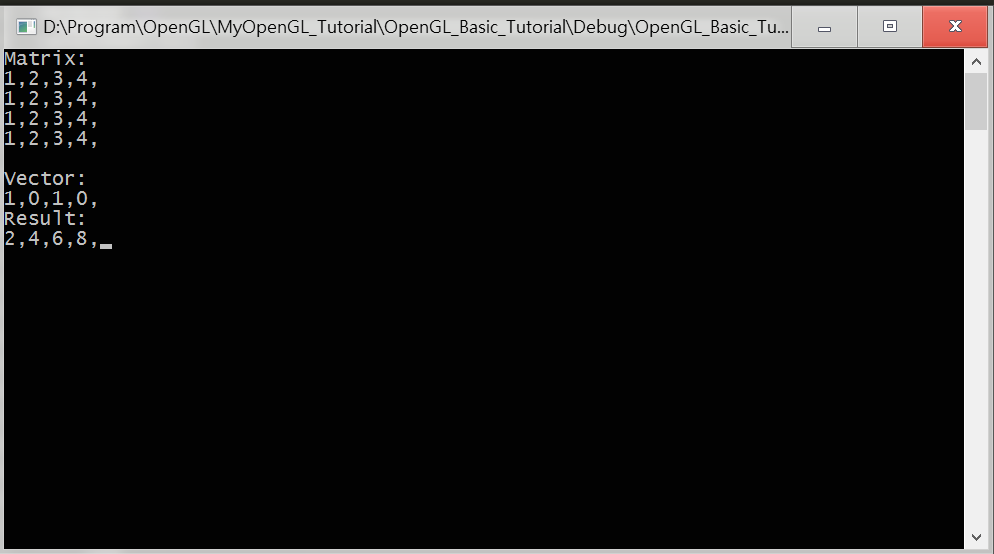
因此,如果要修正的話必須要改成如下形式:
glm::mat4 helloMatrix = glm::mat4(glm::vec4(1.0,2.0,3.0,4.0), glm::vec4(1.0, 2.0, 3.0, 4.0),
這樣結果就修改完成了。
而glm::value_ptr這個函式,原始的定義是根據傳入GLM的參數,根據其最原始型態傳回該參數的指標。而本範例是傳入GLM矩陣、向量,使其傳回浮點數指標,或說是一段float陣列。
# 其他
# 結語
在研究OpenGL上面會碰到很多數學,但是如果找對適當的文章或是解釋,就能打通那任督二脈。而Dowen就是那種需要自己尋找能理解的文章的人。因為有些網站,或是學校的教學方式,就是教學者自己沒咀嚼好,就抽象地教給學習者,所以導致教者不知學者所礙,中間有代溝。Dowen寫的教學文主要是想解決這樣的代溝,所以努力地做圖跟以自己曾經的困惑,自問自答的方式來幫助有同樣困惑的讀者。不過比較差的是以藍寶書的章節為出文的篇幅,如果以後有足夠的經驗與時間,也許會重新製作一份真正的初心者教學吧!